
增强现实技术(AugmentedReality,简称AR),是一种实时地计算摄影机影像的位置及角度并加上相应图像、视频、3D模型的技术,这种技术的目标是在屏幕上把虚拟世界套在现实世界并进行互动。这种技术1990年提出。随着随身电子产品CPU运算能力的提升,预期增强现实的用途将会越来越广。

增强现实技术,它是一种将真实世界信息和虚拟世界信息“无缝”集成的新技术,是把原本在现实世界的一定时间空间范围内很难体验到的实体信息(视觉信息,声音,味道,触觉等),通过电脑等科学技术,模拟仿真后再叠加,将虚拟的信息应用到真实世界,被人类感官所感知,从而达到超越现实的感官体验。真实的环境和虚拟的物体实时地叠加到了同一个画面或空间同时存在。
增强现实技术,不仅展现了真实世界的信息,而且将虚拟的信息同时显示出来,两种信息相互补充、叠加。在视觉化的增强现实中,用户利用头盔显示器,把真实世界与电脑图形多重合成在一起,便可以看到真实的世界围绕着它。
增强现实技术包含了多媒体、三维建模、实时视频显示及控制、多传感器融合、实时跟踪及注册、场景融合等新技术与新手段。增强现实提供了在一般情况下,不同于人类可以感知的信息。
头盔式显示器(Head-mounteddisplays,简称HMD)被广泛应用于虚拟现实系统中,用以增强用户的视觉沉浸感。增强现实技术的研究者们也采用了类似的显示技术,这就是在AR中广泛应用的穿透式HMD。根据具体实现原理又划分为两大类,分别是基于光学原理的穿透式HMD(OpticalSee-throughHMD)和基于视频合成技术的穿透式HMD(VideoSee-throughHMD)。光学透视式增强现实系统实现方案如下图所示。
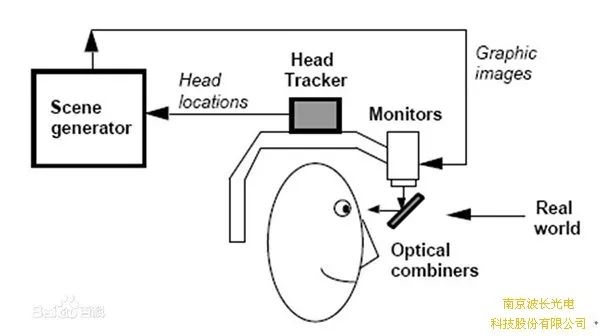
光学透视式增强现实系统具有简单、分辨率高、没有视觉偏差等优点,但它同时也存在着定位精度要求高、延迟匹配难、视野相对较窄和价格高等不足。
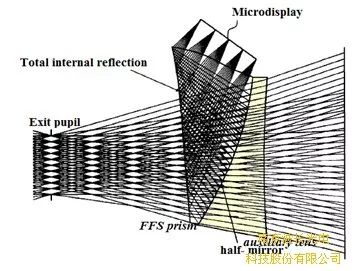
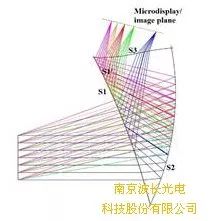
Figure1SchematicofOST-HMD,compromisedofafreeformsurface(FFS)prismandcementedauxiliarylens(highlightedinyellow).Imagetakenfrompatentandmodified.
OST-HMD包含以下两个部分:1楔形自由曲面棱镜2辅助透镜。自由曲面棱镜是用来设计和优化微投影图像的光路(第一光路),然后,辅助设计棱镜是用多重结构来优化畸变(第二光路)
系统是反向设计。实际应用时,HMD光源是微型显示器(如LED、OLED),图像将成像于人眼系统。不管怎样,准确建模和优化,系统应设置成实际出瞳是ZOS中设计的入瞳,微型显示器作为系统的像面。
初始设定包含定义入瞳为6mm和单个视场,便于简单的光线追迹计算。一旦设置完成,可以逐步增加视场角。
棱镜可以使用偏型和倾斜面型来构建,这样可以综合考虑光线是怎么传播的和面型是怎么设定的。图2显示了光线穿过棱镜的路径和光学面顺序的标注
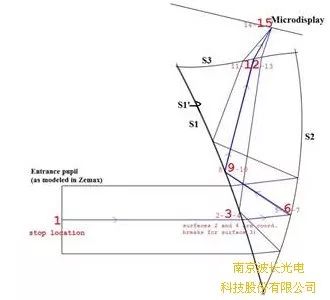
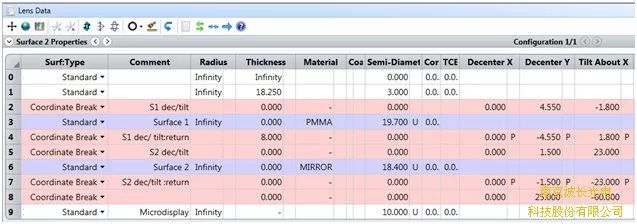
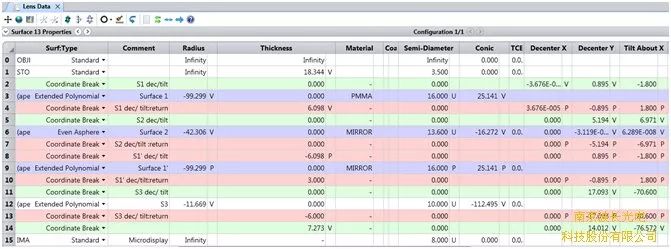
Figure2Finalinitialraytrace(post-optimization)ofchiefrayat0degreesthroughthesystem.ThecorrespondingLDEisshownbelowtogiveareferenceforthesurfacenumbersandcomments(actualfinaldesignvaluesofparametersmayvary).
在LDE图表中红色的代表了坐标断点组,黑色备注表示了光学面序号
比如第8-10面是光学面9,对应的是标注的表面S1,第8面和第10面是光学面9的坐标断点面,用来倾斜和偏心的虚拟面。
当建模至如上图所示,设置孔径光阑(入瞳)为全局坐标参考,棱镜的第一个面放置在孔径光阑后18.25mm位置,倾斜或平移等操作都必须使得最后光线聚焦至像面。
光线穿过S1表面(光学面3)至S2(光学面6)。光学面6是反射面,用来反射光线至棱镜内。实际使用过程中,此面是镀上半透半反膜:反射光线至棱镜内然后到达微型显示器,部分光线可直接穿透可看清前方。后面我们会使用多重结构来模拟此种效果。
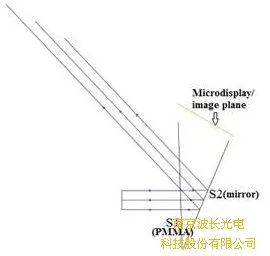
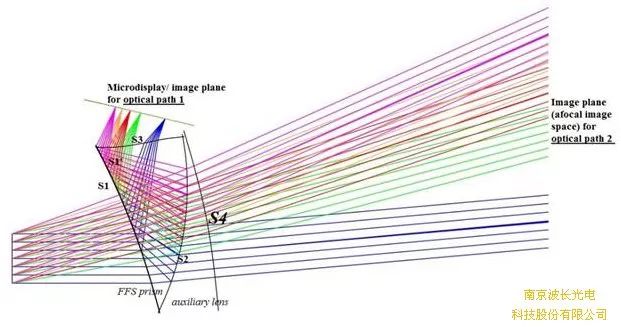
Figure3Rayaimingbackwardsthroughthesystem(fromthe”eye”tothemicrodisplaywhichservesastheimageplaneinourmodel).
注意点:
1为更好地查看光线路径,微型显示器应垂直于出射主光线。
2图中忽略了边缘控制,为了查看光线传播效果,不想显示边界和部分虚拟面可在面型特性中选择“Donotdrawedgesfromthissurface”“Donotdrawthissurface”.
分析系统图,光线需再次在S1面上反射,然后到达像面,这是棱镜内的全内反射。
全内反射在序列模式中是不支持的,然而可以将S1面作为反射面。使用Pickup功能来使得S1面和S3面是相同的。在坐标断点面上设置pickup参数,同样用来保证S1与S3倾斜和偏心一致。

最后在像面前的S3面的功能与前面几个面型一致,设置必要的x方向倾斜和y方向偏心。
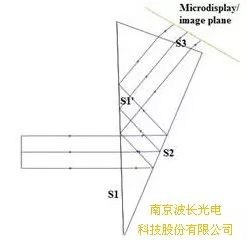
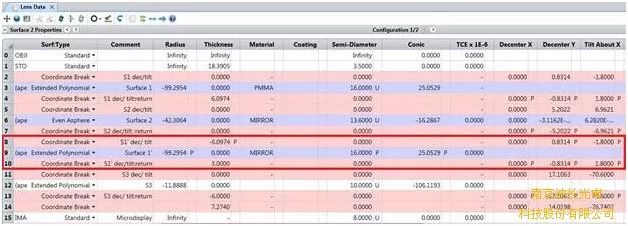
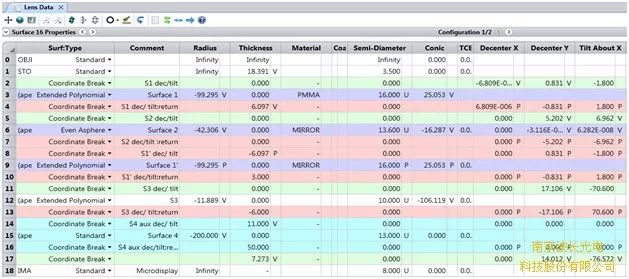
Figure4Completedinitialraytracethroughprism.Thesystemisnotyetoptimizedandjustshowseachsurfacetilted/decenteredinrelationtooneanotherinordertoachievethedesiredwedge-prismshape.
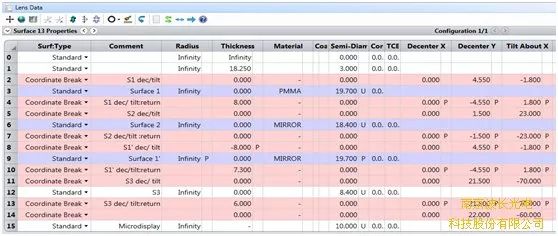
视场设置许多设置几个视场,因为自由曲面计算更多的视场数据,计算结果越准确。这样ZOS可以更有效率地优化。同样,视场应设置X和Y方向点,因为此系统非旋转对称系统。
(TIR)全内反射
光学面的孔径通过调整半孔径高和孔径类型来调整。此系统的孔径是方形孔径。方形孔径可以通过表面特性中“Aperturetype”来设置,设置成“RectangularAperture”。
优化使用RMS波前差方法,参考是质心参考,增加臂和环的采样数使得优化性能提高。在优化操作函数中根据需要添加的约束,主要约束包括有效焦距(EEFL),厚度,全局坐标,光程长度,倾斜/偏心参数、角度和畸变。
优化放置光学表面S1’S1参数使用全局坐标约束(GLCZ/GLCY/GLCZ),因为虽然这只是一个表面;它只是建模为两个表面,随着光线通过棱镜由于序列的性质和功能模式和光学性质的差异引入了误差。除了使用这些操作数,LDE已经建立了PICKUP求解解决了表面9和3(如前所述)。
光程约束是有必要,特别是从S3面和S1’再到像面,保持图像的位置,实际应用中就是保持机械结构的紧密。
同样地,倾斜/偏心参数约束保持通用棱镜的形状和防止表面互相偏离太强烈。
最初的表面类型为standardlens,慢慢更改为偶次非球面和自由表面;在这种情况下,将表面S1Se更改为ExtendedPolynomial。表面2保持为偶次非球面。
到目前为止,第一光路(投影成像光路)和FFS棱镜进行了优化。第二光路系统(可视路径)需要配置和优化,主要通过使用一个辅助透镜巩固了FFS棱镜S2表面
至此,优化FFS棱镜(矩形光阑)及其LDE里的参数。
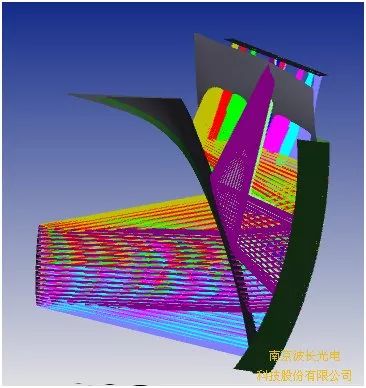
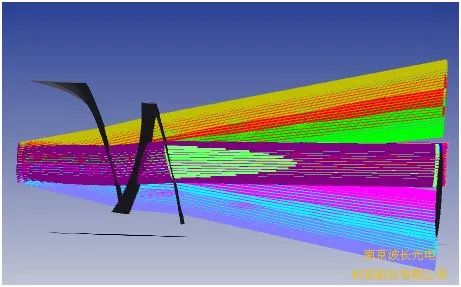
建立整个OST-HMD系统,辅助透镜表面S4(如下所示)需要添加到现有的FFS棱镜。多重结构编辑器(MCE)将被用来将整个系统分为两个结构,具体设置如文章的开头描述::投影成像路径(光路1)和可视光路(光路2)。这两个配置和配置的结果覆盖另一个看起来如下:

建立多重结构,在第二光路中,S4添加在图像平面前(S4是最后表面光线将通过在图像)。
通过多重结构设置将系统分成了两个独立的光路。通过多重结构,我们可以分开来优化各光路。也就是说,我们可以进一步优化,一部分是有限物距FFS棱镜光路使用RMS波前差法来优化,另一部分是无焦的可视辅助透镜。在可视光路中,我们想能透过护目镜来观察周围环境(尽管是像面无焦设计)。我们希望无穷远处的图像经过护目镜等成像到视网膜上,畸变小,且无光焦度。
查看各独立结构和LDE里的数据,在结构1中,LDE中光学面是光学面0-13和像面(LDE中的光学面17和18)。结构2中包含S1和S2的表面,但不再利用表面S1’或者S3。因此,那些表面LDE都省略了。结构2是只考虑表面0-7,14-16和18。
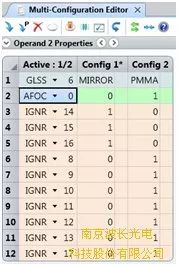
查看多重结构设置,在config*下的那列数据值为“1”表示操作数是活跃的和“0”指示的操作数是不活跃的/不使用特定的配置。使用多重结构操作数IGNR来使得结构忽略选定的表面。例如,看3-5行,表面14-16表示为配置1表示被忽略,。注意使用GLSS操作数中改变表面的材料类型,这个表面最初表示作为一个镜子(投影成像路径,结构1)模拟反射属性,实际上是半透半反表面。在结构2中,光线需要透过,因此更改辅助透镜材料为PMMA。多重结构操作数AFOC可以激活“无焦像空间”选项(结构2)。
使用多重结构,MCE和LDE中的数据都可以得到优化。在优化操作函数编辑器中,使用CONF操作数来控制多重结构的选择。在conf下列举的操作数都是用来优化”Cfg#”下的结构,直到遇到下一个操作数CONF.
增强现实将真正改变我们观察世界的方式。想像您自己行走在或者驱车行驶在路上。通过增强现实显示器(最终看起来像一副普通的眼镜),信息化图像将出现在您的视野之内,并且所播放的声音将与您所看到的景象保持同步。这些增强信息将随时更新,以反映当时大脑的活动。在这篇文章中,我们将了解这项未来技术、其技术构成以及如何使用该技术。